FlexDevice/FlexConfig等に記載されている”RBS”とは?
コントロールユニットを開発する場合、適切な機能テストは非常に重要です。ただし、ほとんどの場合、システム全体をコントロールユニットのテストに使用することはできません。したがって、いわゆるレストバスシミュレーション(RBS)を使用して、欠落しているコントロールユニットデータをシミュレートする必要があります。
車両開発におけるレストバスシミュレーションには、多くのアプリケーションの可能性と展開時間があります。初歩的なECUテストから、自動車ネットワークの部分統合テストまで、早い段階で使用できます。レストバスシミュレーションは、ネットワークの一部のみが存在し、残りをシミュレーションする必要がある場合に理想的です。コントロールユニットの欠落している機能は、RBSでシミュレートできます。 通常、OEMは、ECUのパーティション分割まで、システムのグローバルな設計と説明を提供します。このようなシステムは、あらゆる種類のプロパティと値を持つさまざまな信号で構成されているため、複雑さを軽減することが重要です。したがって、ECUアプリケーションに影響を与える関連信号を特定する必要があります。
さらに、構成は、選択されたシステムのリアルタイム動作を可能にするために適切なタイミング動作を提供する必要があります。 FLEXRAY-RESTBUSシミュレーション 以前のバスシステムと比較して、FlexRayはより高い伝送速度を持ち、時分割多元接続のおかげでリアルタイム操作も可能です。ただし、これにより、FlexRayネットワークの開発と構造に対する要求が大幅に高まり、FlexRayレストバスシミュレーション(RBS)にも影響を及ぼします。 FlexRayを備えたRBSでは、メッセージは決まった時間に送信する必要があります。これには、リアルタイムのスケジューリングが必要です。 FlexRayコントローラーがデータを送信するためには、さまざまな境界条件が満たされている必要があります。
特に、これらには、少なくとも2つの起動ノードの存在、正しく計算されたCRCアルゴリズム、正確に送信されたネットワーク管理メッセージ、およびメッセージ(アライブ)カウンターが含まれます。 FlexRay RBSは、これらすべてをリアルタイムで考慮する必要があります。 CANとは異なり、FlexRayを使用して専用ハードウェアでRBSを実行する方が理にかなっています。リアルタイムハードウェアプラットフォームは、FlexRayメッセージが指定されたスロットで送信されることを保証します。このような種類のハードウェアの例は、FlexDevice-Lです。さまざまな接続オプション(CAN、FlexRay、LIN、RS232、SPI、CAN-FD、イーサネット、BroadR-Reach)により、このハードウェアは多くのアプリケーション分野で使用できます。
FlexRayとは何?
FlexRayは、自動車用の高速で決定論的でフォールトトレラントなバスシステムです。 2000年以来、FlexRayコンソーシアムのコアパートナーであるBMW、DaimlerChrysler、Motorola(Freescale)、Philips Semiconductors(NXP)、Bosch、General Motors、およびVolkswagenはFlexRay仕様を推進してきました。 これは現在ISO規格に変換されています。 車両に取り付けられたコントロールユニット間のデータ交換は、現在主にCANネットワークを介して実行されています。 ただし、新しいテクノロジーの導入とデータ量の増加により、特にフォールトトレランスとメッセージ送信の時間制御に関する需要が高まっています。 FlexRayは、固定タイムスロットでメッセージを送信し、2つのチャネルでフォールトトレラントで冗長な送信を行うことにより、これらの増大する要求を満たします。
FlexRayノードの構造は
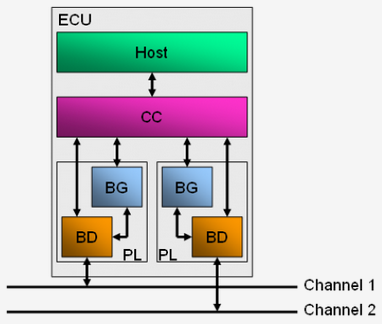
FlexRayノードは、ホストプロセッサ、FlexRay通信コントローラー(CC)、バスガーディアン(BG)、およびチャネルごとに1つのバスドライバー(BD)で構成されます。 FlexRay Communication Controllerは、ノードをネットワークの他の部分と同期させる役割を果たします