Embedded EtherCAT Master Stack
本マスタスタックは、高速フレームを必要とする高性能組み込みアプケーション向けに開発されました。モーションやロボット工学などのジッタを最小限に抑えたレートまたは高精度の同期を実現しております。


特徴:
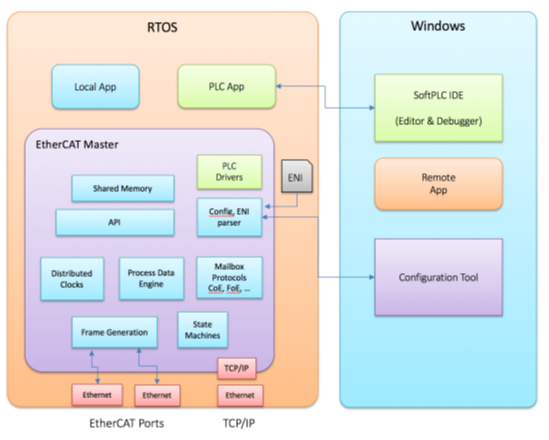
①ETG.1500で定義されているEtherCATマスタークラスAに準拠、プロセスデータイメージ (共有メモリ経由) および API 経由で作成できます。
②タイトな(最小限のジッター)動作のための分散クロック「DC」をサポート。
③プロセスデータ PDO処理と、次のメールボックスプロトコルをサポートします。
・ CAN over EtherCAT 「CoE」
・ File over EtherCAT 「FoE」
④マスタースタックと構成ツールは両方とも、接続されたスレーブ デバイスの EEPROM との対話を可能にします。
⑤セカンダリ EtherCAT ポートを使用したケーブル冗長性をサポート。
⑥構成ツールとの対話およびリモート アプリケーションとの対話のための組み込み TCP/IP。
⑦フレーム レート、フレーム エラー/損失、ジッター、およびネットワークとスレーブ デバイスの診断に役立つその他の断続的なイベントを監視する診断機能。
⑧PLC アプリケーションと統合するための SoftPLC ドライバー (IEC-61131 に準拠)。
サポートOS及びハードウエア:
FreeRTOS on Xilinx ZYNQ 7000
INtime 6.4 RTOS on Intel x86 platform
Windows 32/64 bit x86 platform(注1)
NORTi on Renesas RZ/T2M or RZ/T1(注2)
注1: Windows マスタはリアルタイムではないため、基本的な操作と構成の確認に適しています。
注2:ITRONベースのミスポ製NORTi Professionalで動作実績があります。
ハードウェア抽象化レイヤーにより、他の RTOS や HW プラットフォームへの移植が比較的簡単に可能になります。

コンフィギュレーションツール:
本マスタスタックを動作させるためのツールを提供します。
ESIファイルを登録し、スレーブを配置しENIファイルが本ツールで作成可能です。
ライセンス:
本マスタスタックはソースコード形式で提供します。
マスタ毎のランタイムライセンスは不要!
コンフィギュレータ ツールはWindowsで動作可能なバイナリ形式で提供し、ランタイムライセンスが必要です。コンフィギュレーションツールもソースコード形式での提供も可能です。